Published Papers
Google Scholar Profile | * = corresponding/first author

Uncertainty Aware and Decoder Aligned Learning for Video Summarization
O. Tariq, M. Raza, S. Jeongbae
2026 International Joint Conference on Neural Networks (IJCNN), Maastricht, Netherlands
Uncertainty-aware framework with decoder-aligned learning for robust video summarization.
Accepted
NOS-Gate: Queue-Aware Streaming IDS for Consumer Gateways under Timing-Controlled Evasion
M. Bilal, O. Tariq, H. Ahmed
IEEE Transactions on Consumer Electronics
Queue-aware streaming intrusion detection system robust to timing-controlled evasion attacks on consumer gateways.
ADP-QFed: Privacy-Preserving Quantized Federated Learning for Intelligent Edge Sensing in IoT Systems
O. Tariq, M. Bilal, D. Han
IEEE Internet of Things Journal, 2025 IF: 8.9
Combines adaptive differential privacy with quantized federated learning for privacy-preserving collaborative edge intelligence in IoT systems.
Quantum-Inspired Reinforcement Learning for Secure and Sustainable AIoT-Driven Supply Chain Systems
Dastagir, M. B. A., O. Tariq, Al-Kuwari, S., & Farouk, A.
IEEE Internet of Things Journal, 2025 IF: 8.9
Quantum-inspired reinforcement learning for secure and sustainable AIoT-driven supply chain optimization.
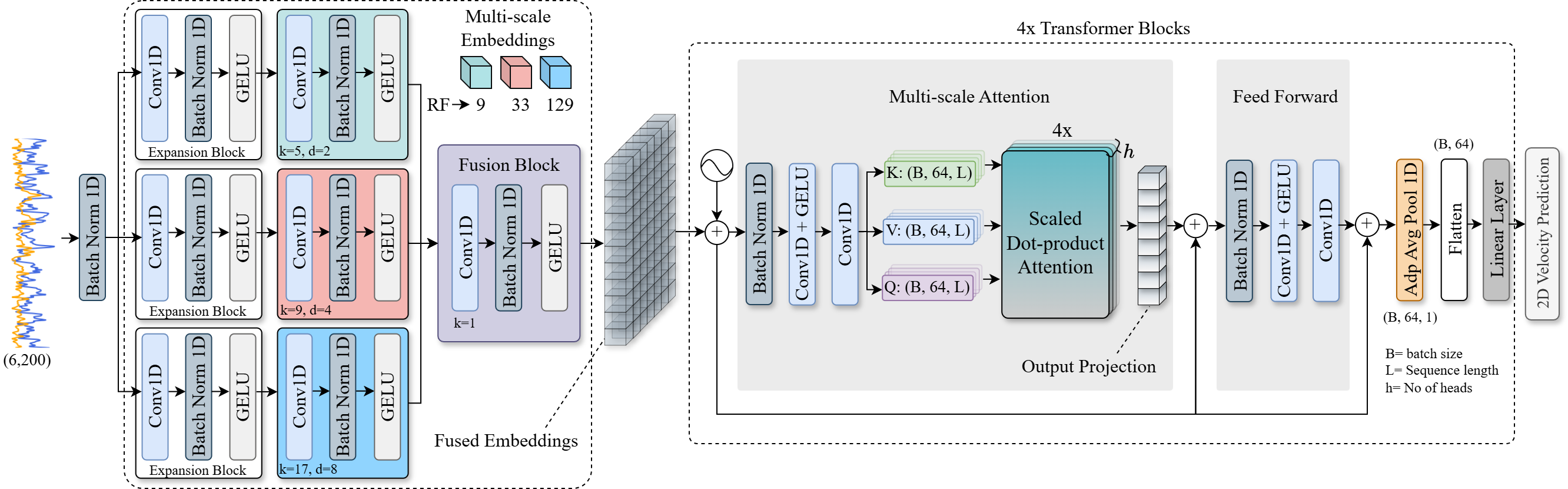
NanoMST: A Hardware-Aware Multiscale Transformer Network for TinyML-Based Real-Time Inertial Motion Tracking
O. Tariq, D. Han
IEEE Internet of Things Journal, 2025 IF: 8.9
Ultra-lightweight multiscale transformer (298K params, 8-bit quantization) for TinyML inertial motion tracking — 4.7× compute reduction over LSTM baselines with real-time edge performance.
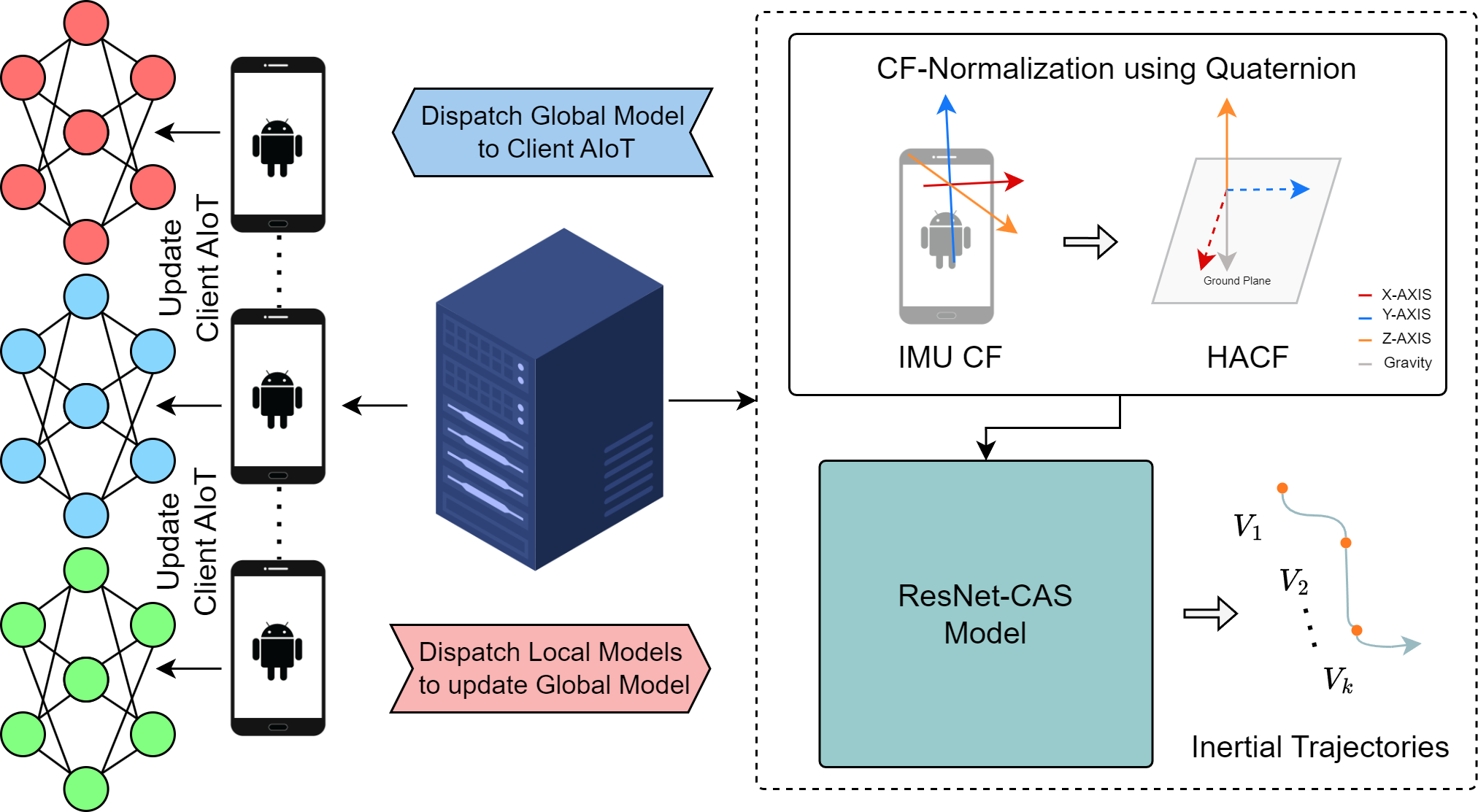
DeepILS: Towards Accurate Domain Invariant AIoT-enabled Inertial Localization System
O. Tariq, B. Dastagir, M. Bilal, D. Han
IEEE Internet of Things Journal, 2025 IF: 8.9
Domain-invariant AIoT-enabled inertial localization achieving sub-meter accuracy across diverse environments without environment-specific retraining.
Meta-Swin: Lightweight Image Super-Resolution Swin Transformer for Metaverse Applications
O. Tariq, Dastagir M.B.A., M. Bilal, D. Han
2nd International Conference on Intelligent Metaverse Technologies & Applications (iMETA), Dubai, 2024
Lightweight Swin Transformer for image super-resolution designed for resource-constrained metaverse applications.
FedNav: A Federated Learning Approach for Secure AIoT-enabled Inertial Odometry
O. Tariq, M. Bilal, D. Han
Proc. IEEE Annual Congress on AIoT, Melbourne, Australia, 2024
Federated learning framework for privacy-preserving collaborative inertial odometry training across distributed IoT devices.
TabCLR: Contrastive Learning Representation of Tabular Data Classification for Indoor-Outdoor Detection
M.B.A. Dastagir, O. Tariq, D. Han
IEEE Access, 2024 IF: 3.6
Contrastive learning approach for tabular sensor data to improve indoor-outdoor detection classification accuracy.
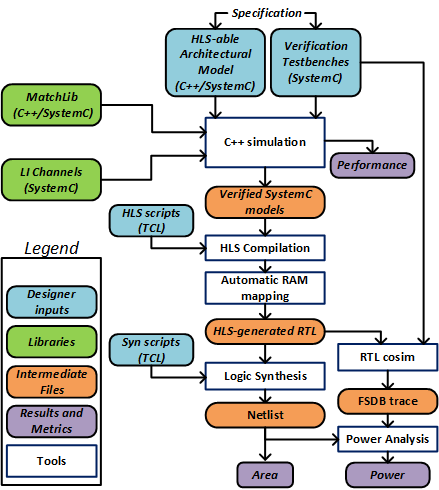
Compact Walsh–Hadamard Transform-Driven S-Box Design for ASIC Implementations
O. Tariq, Dastagir M.B.A., D. Han
Electronics, vol. 13, no. 16, 2024 IF: 2.6
Area-efficient S-Box design for ASIC using Walsh-Hadamard transforms with strong cryptographic properties.
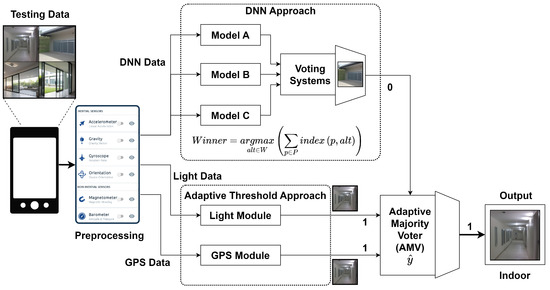
DeepIOD: Towards A Context-Aware Indoor–Outdoor Detection Framework Using Smartphone Sensors
O. Tariq, Dastagir M.B.A., D. Han
Sensors, vol. 24, no. 16, 2024 IF: 3.5
Context-aware indoor-outdoor detection using smartphone sensors for adaptive location-based application behavior.
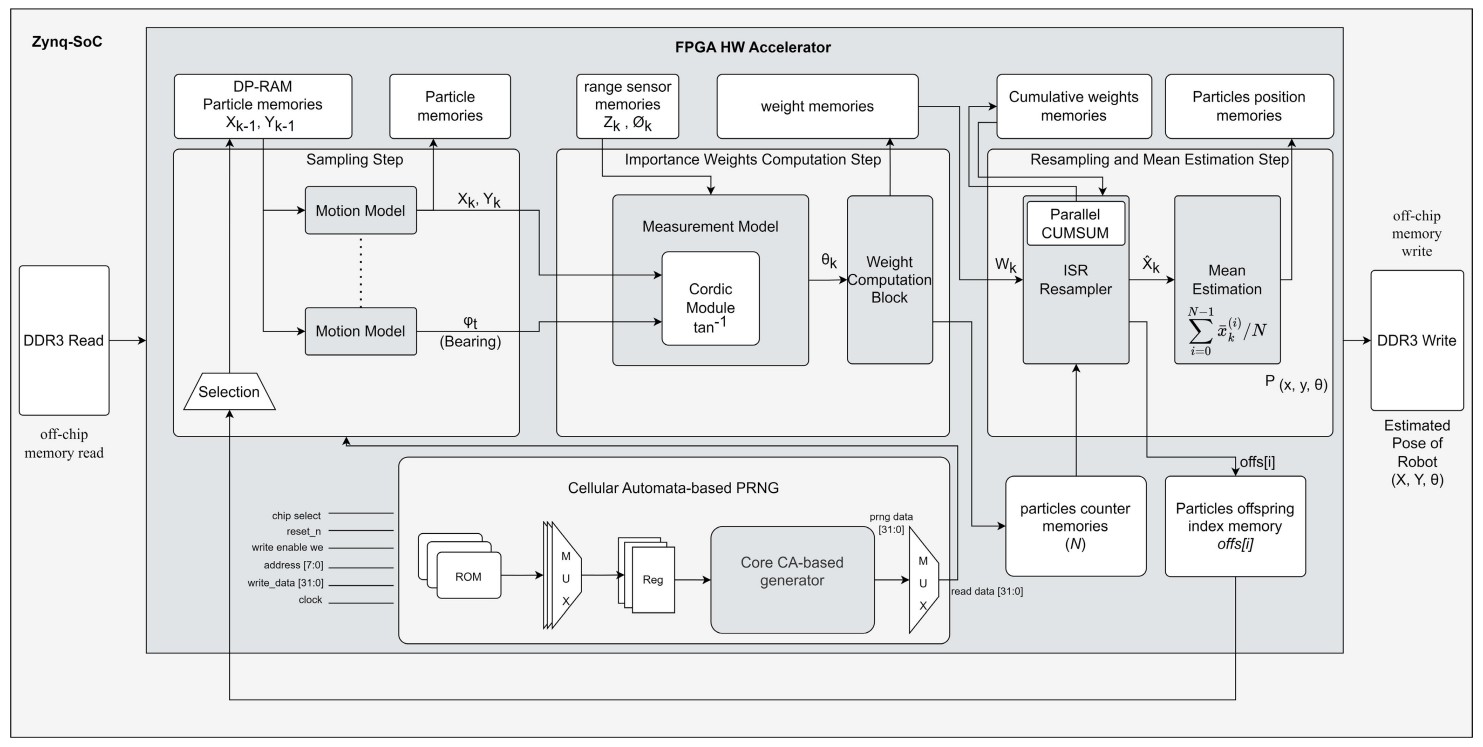
2D Particle Filter Accelerator for Mobile Robot Indoor Localization and Pose Estimation
O. Tariq, D. Han
IEEE Access, vol. 12, 2024 IF: 3.6
Real-time FPGA-based particle filter SLAM accelerator for mobile robot indoor localization — 60% latency reduction over software baseline at 30 FPS.
A Smart Card-Based Approach for Privacy-Preserving Authentication of Non-Fungible Tokens Using Non-Interactive Zero Knowledge Proof
M.B.A. Dastagir, O. Tariq, D. Han
Proc. SmartWorld / UIC / ScalCom / DigitalTwin / PriComp / Meta, Haikou, China, 2022
Privacy-preserving NFT authentication using smart cards and zero-knowledge proofs.
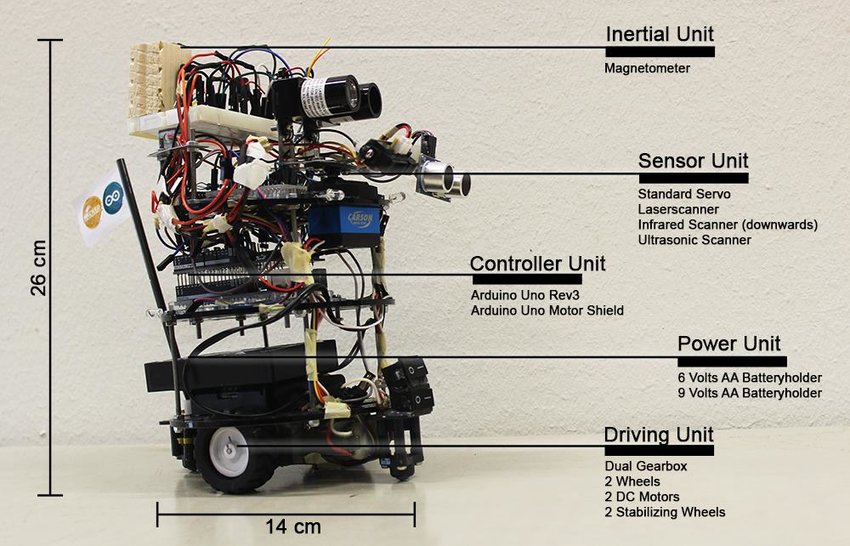
HILO: High-Level and Low-Level Co-Design, Evaluation, and Acceleration of Feature Extraction for Visual-SLAM Using PYNQ Z1 Board
M.B.A. Dastagir, O. Tariq, D. Han
Proc. IPIN-WiP, Beijing, China, 2022. CEUR-WS, vol. 3248
Co-design approach for accelerating visual SLAM feature extraction on FPGA, optimizing algorithm performance and hardware efficiency jointly.
Papers Under Review
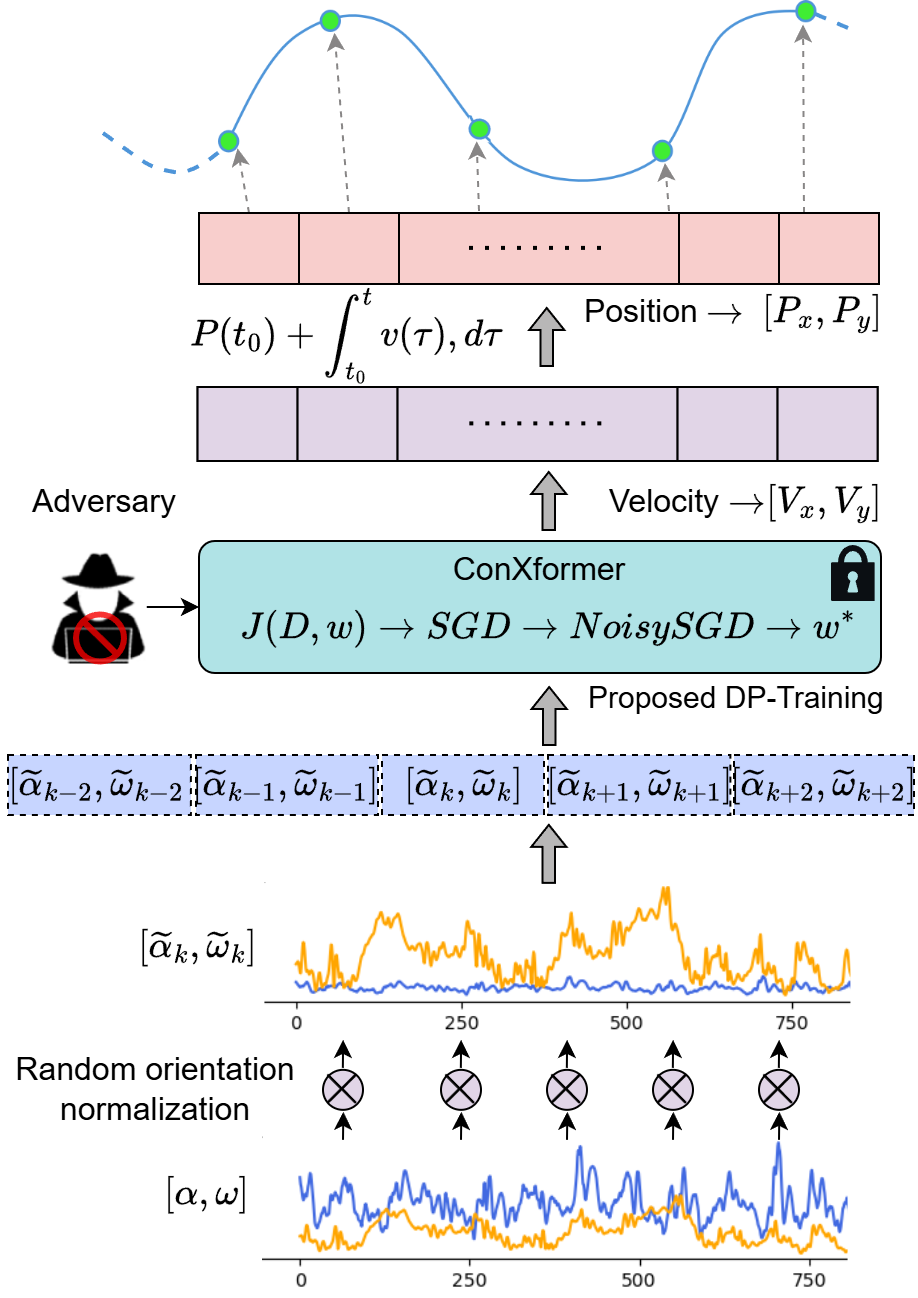
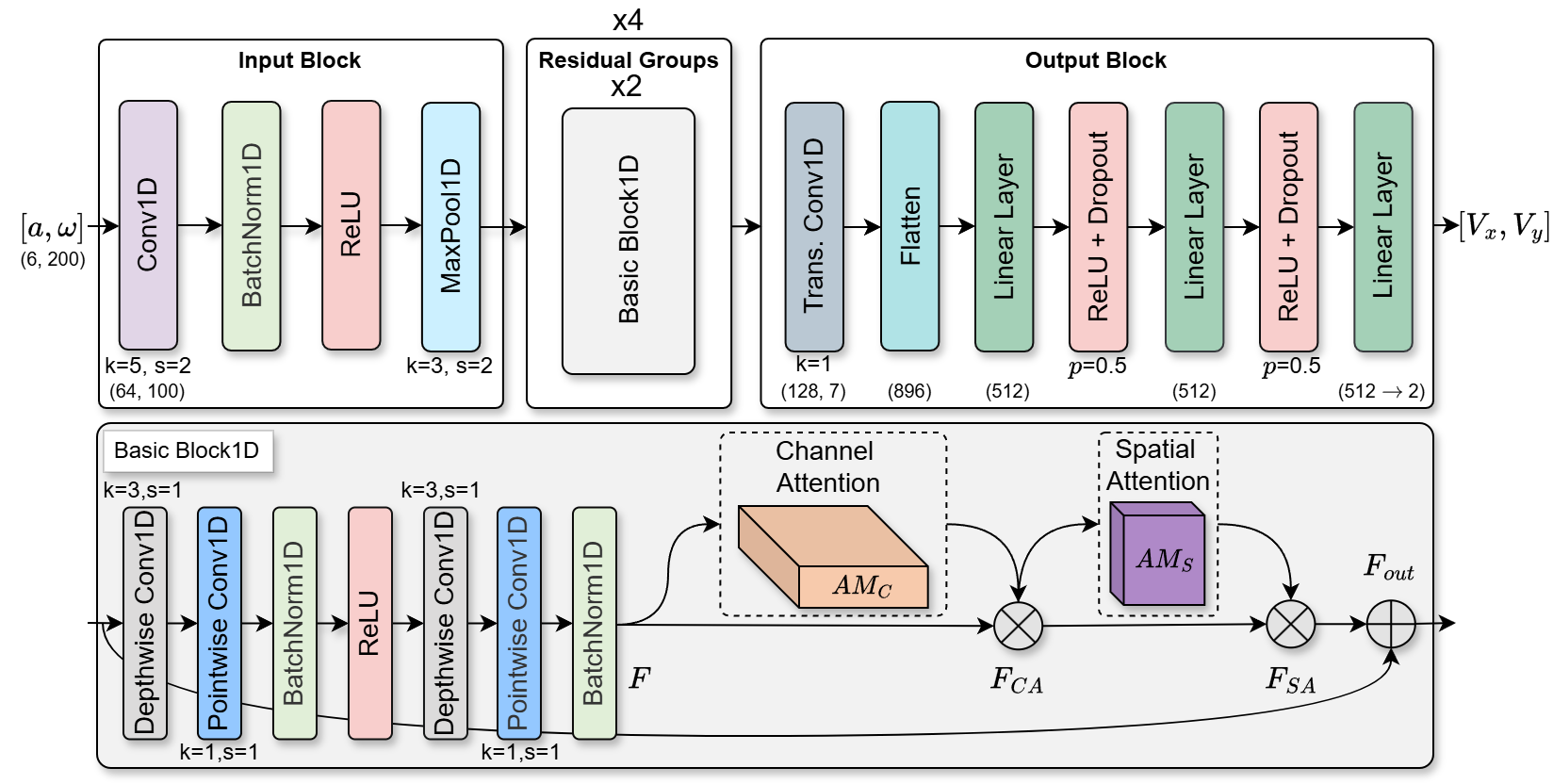
ConvXformer: Differentially Private Hybrid ConvNeXt-Transformer for Inertial Navigation
O. Tariq, M. Bilal, MU Hassan, D. Han, J. Crowcroft
IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2025
Differentially private hybrid ConvNeXt-Transformer architecture providing formal ε-DP guarantees for distributed multimodal sensor fusion without sacrificing localization accuracy.
TRIP: Towards Realtime Deep Inertial Odometry for Pose-Invariant Pedestrian Navigation
O. Tariq, Y. Oh, D. Han
IEEE Internet of Things Journal, 2025
Real-time deep learning framework for inertial odometry that maintains accuracy regardless of device orientation for pedestrian navigation.
Q-Quant: Few-Shot Quantum-Aware Ternary Quantization of YOLO for Low-Power Edge Perception in Intelligent Transportation Systems
Dastagir, M. B. A., O. Tariq, Al-Kuwari, S., & Farouk, A.
IEEE Intelligent Transportation Systems Transactions, 2025
Few-shot quantum-aware ternary quantization of YOLO for ultra-low-power edge perception in transportation.
Quantum Latent Generative Modeling Learning for Intelligent Transportation System
Dastagir, M. B. A., O. Tariq, Al-Kuwari, S., & Farouk, A.
IEEE Intelligent Transportation Systems Transactions, 2025
Quantum-enhanced generative modeling for traffic pattern prediction and intelligent transportation management.