Technical Projects
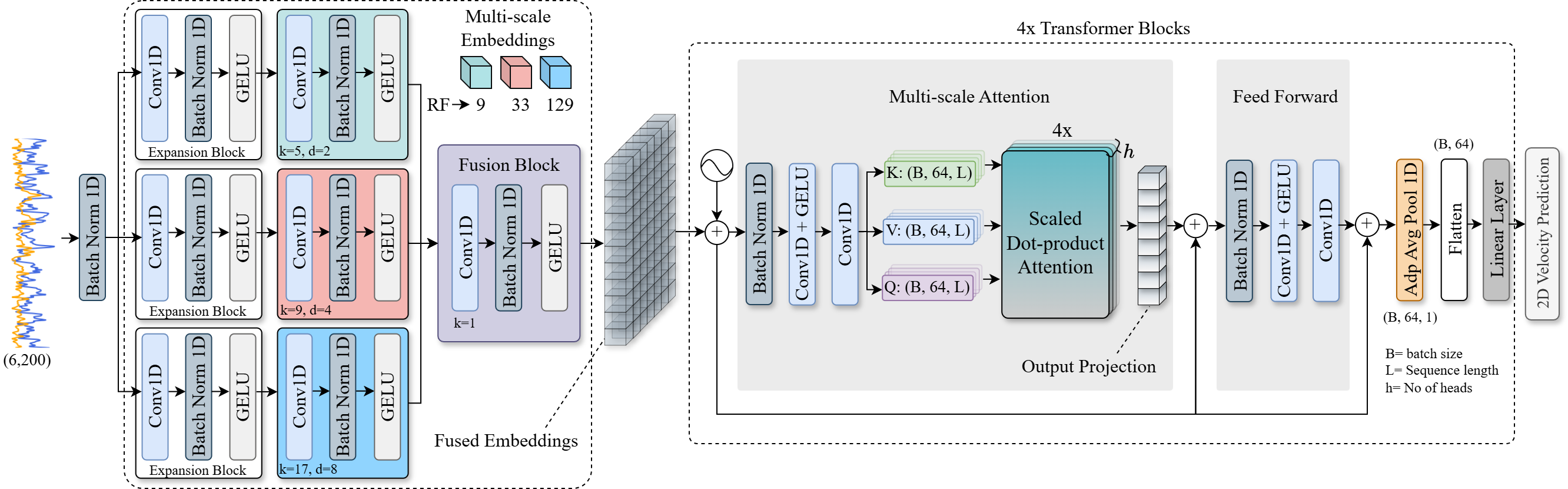
NanoMST: Lightweight Multiscale Transformer
Jan 2024 - Present
Designed a hardware-aware multiscale transformer architecture optimized for TinyML applications. NanoMST enables accurate real-time inertial motion tracking on resource-constrained devices while maintaining high accuracy through efficient model design.
Transformers TinyML Model Compression Embedded AI
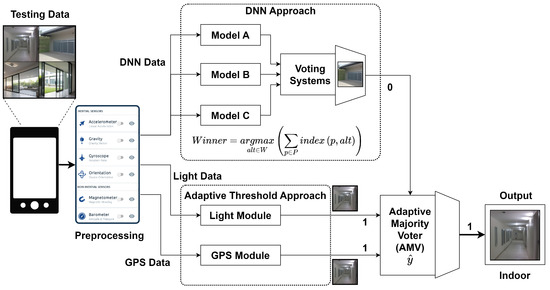
DeepIOD: Context-Aware Indoor-Outdoor Detection
Jan 2024 - Jun 2024
Developed a context-aware framework for indoor-outdoor detection using smartphone sensors. DeepIOD utilizes deep learning to accurately classify environments, enabling adaptive behavior in location-based applications without privacy-invasive data collection.
Mobile Computing Context Awareness Smartphone Sensing Environmental Classification
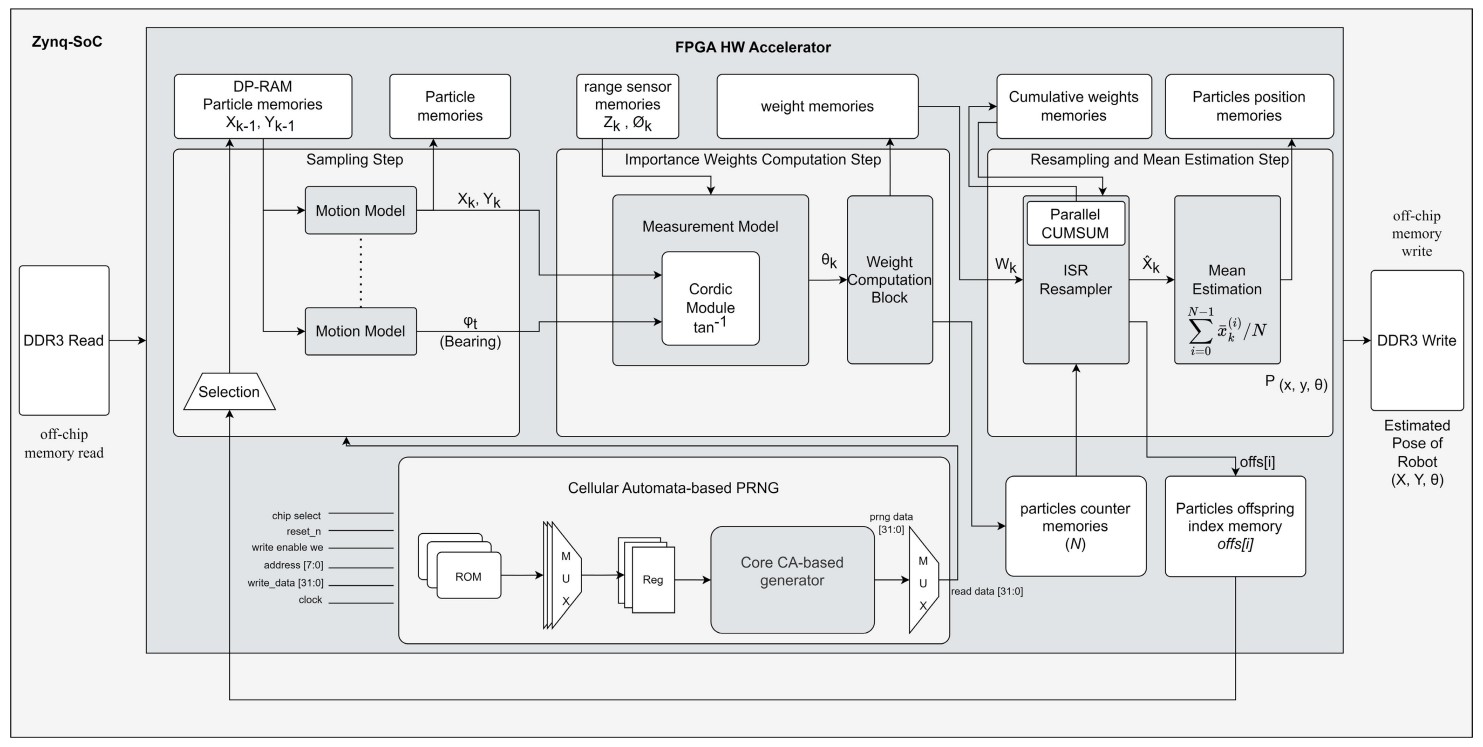
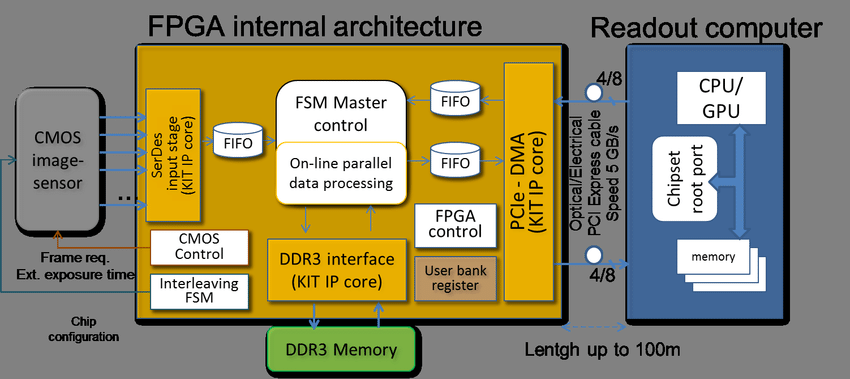
FPGA-based Particle Filter SLAM Accelerator
Oct 2022 - Mar 2024
Developed a real-time FPGA-based particle filter SLAM accelerator for mobile robot navigation. The implementation achieved significant speedup compared to CPU-based solutions while maintaining accuracy for indoor localization and pose estimation.
FPGA SLAM Robotics Embedded Systems
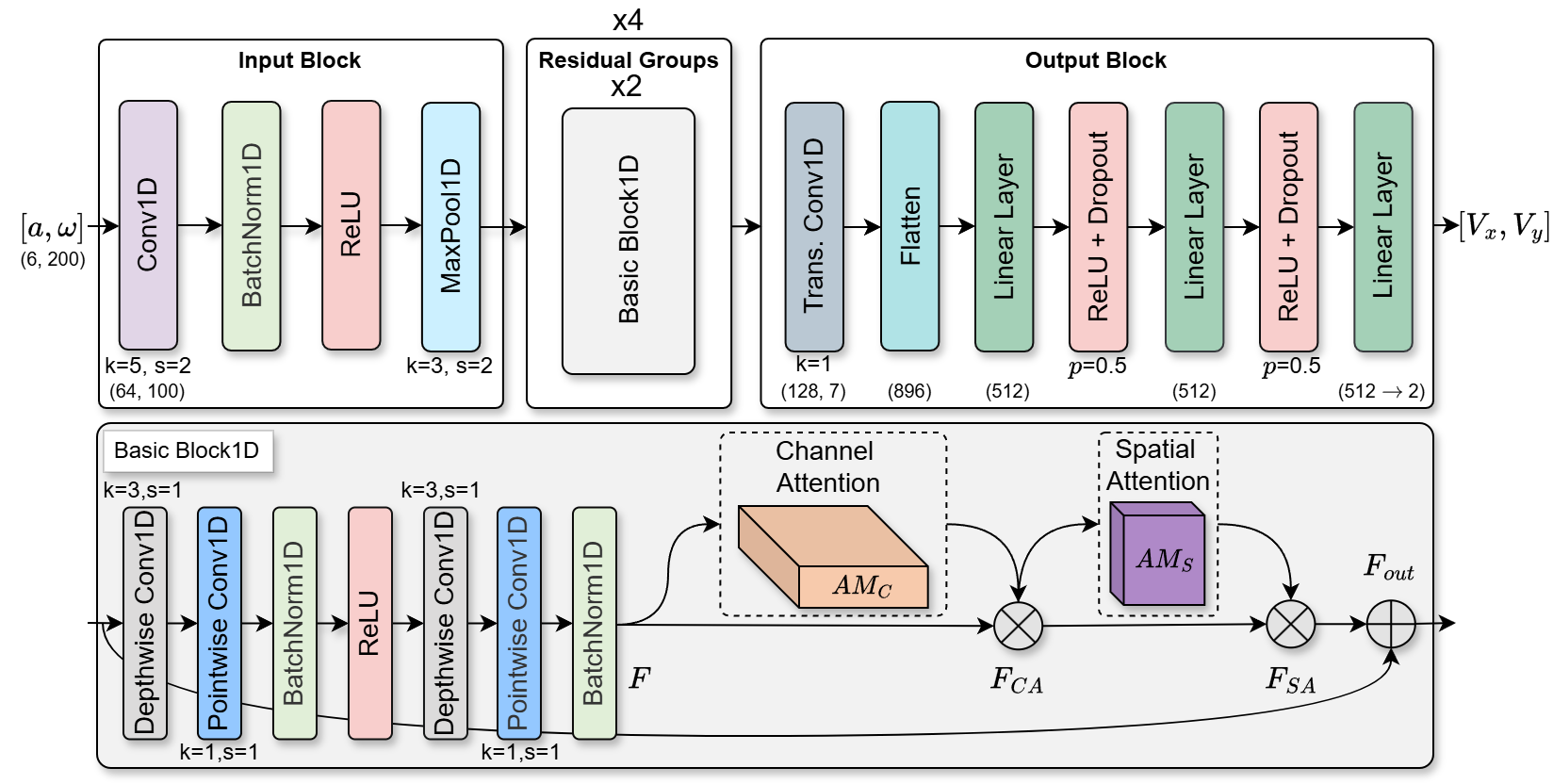
DeepILS: AIoT-enabled Inertial Localization System
Feb 2023 - Feb 2025
Developed a domain-invariant inertial localization system using deep learning techniques. The system leverages smartphone sensors to provide accurate positioning without requiring environment-specific training, making it suitable for diverse deployment scenarios.
Deep Learning AIoT Inertial Navigation Domain Adaptation
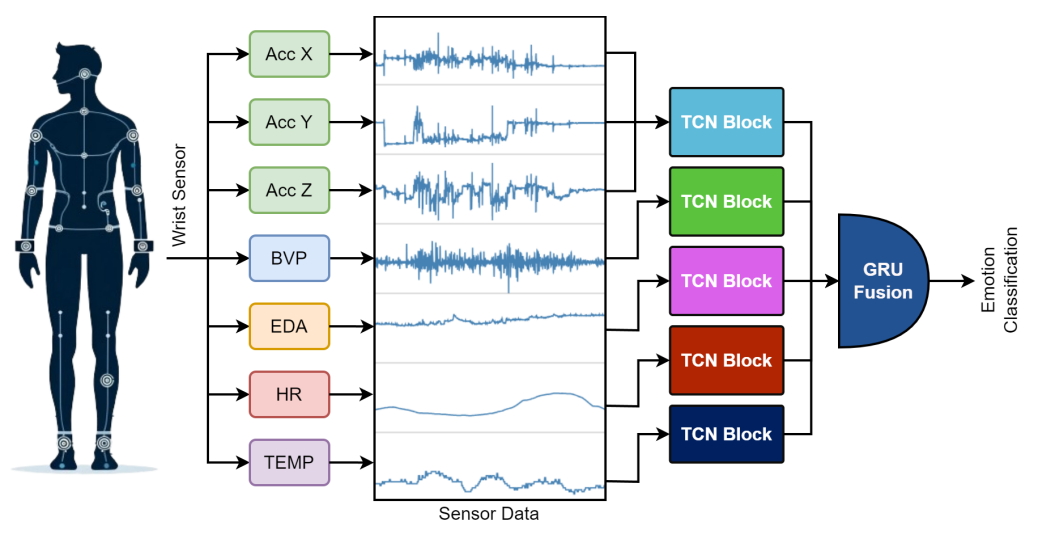
EmoHEAL: Emotion Recognition Framework
May 2024 - Oct 2024
Designed a fusion-based framework for emotion recognition using wearable sensors. EmoHEAL integrates data from multiple sensor modalities to accurately detect and classify emotional states, with applications in mental health monitoring and human-computer interaction.
Multimodal Fusion Wearable Computing Affective Computing Health Tech
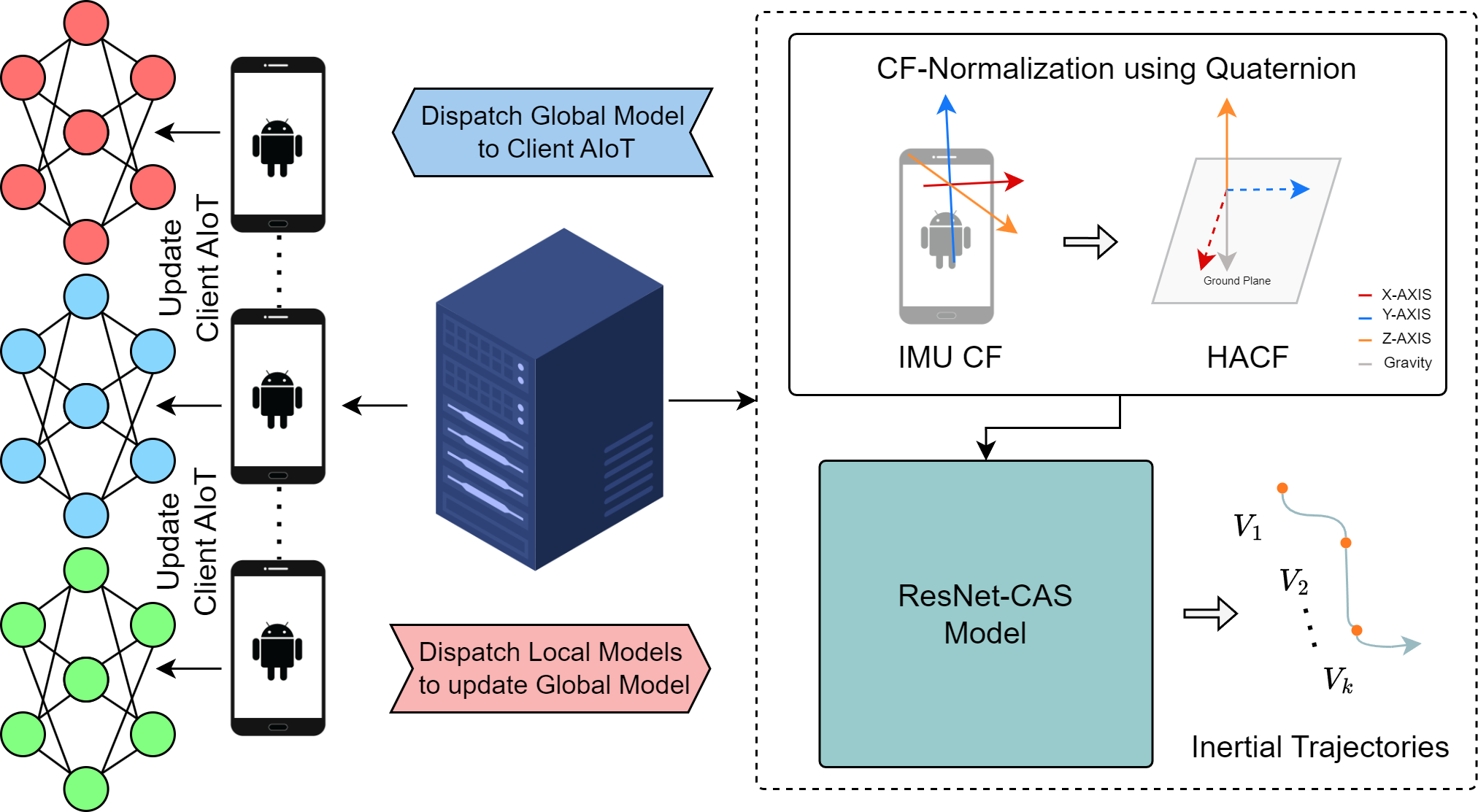
FedNav: Federated Learning for Inertial Odometry
Dec 2023 - Aug 2024
Implemented a federated learning approach for privacy-preserving inertial odometry. FedNav enables collaborative model training across multiple devices without sharing sensitive location data, balancing privacy requirements with navigation accuracy.
Federated Learning Privacy-Preserving AI Inertial Navigation Edge Computing
Professional Experience
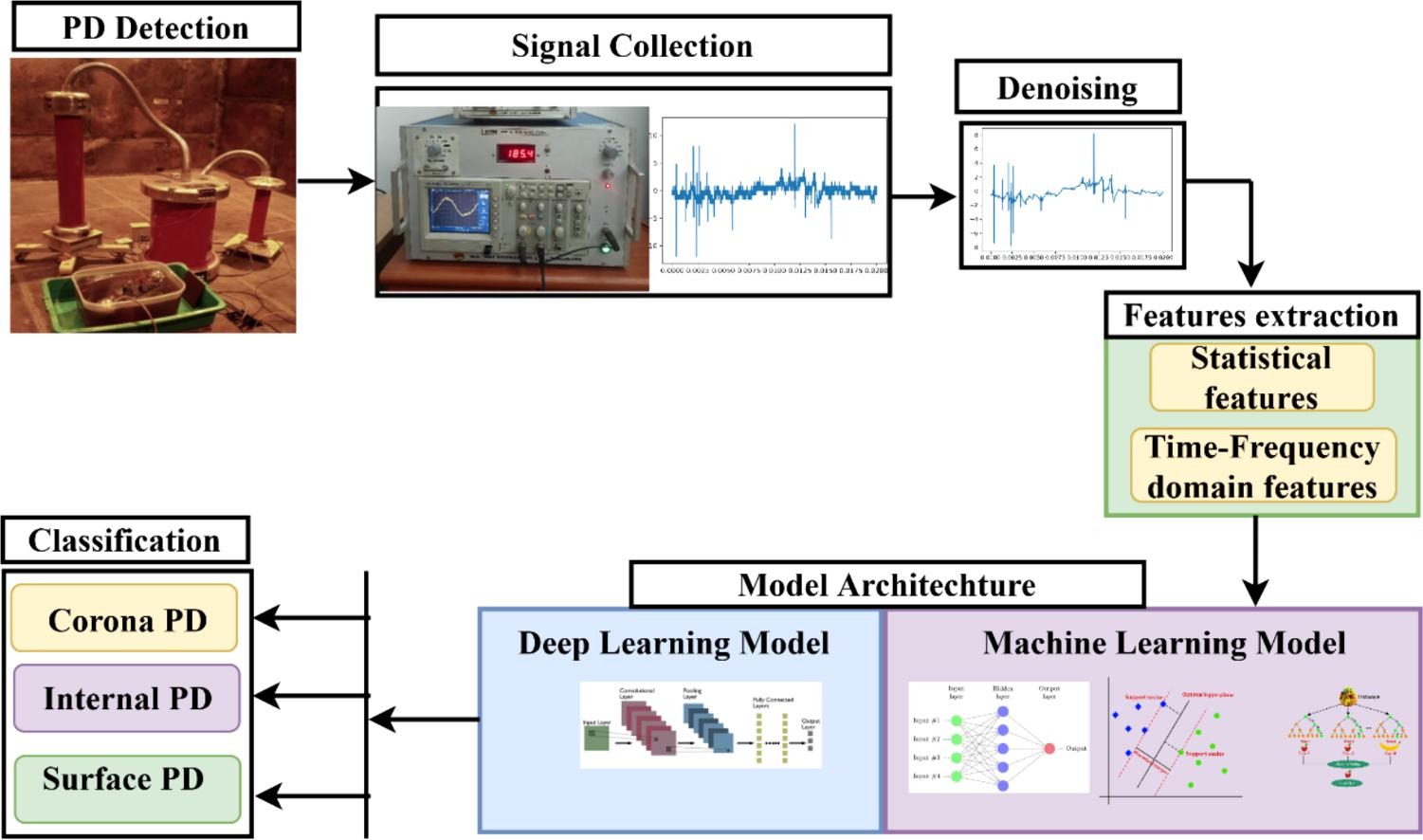
Machine Learning for Fault Detection in PRPD Images
Monitra, UK (Mar 2025 - Present)
Developing secure Python scripts to authenticate with Azure REST APIs and automate data ingestion from the Atlas platform, handling real-time access to labeled PRPD datasets. Training machine learning models using TensorFlow for fault type classification in PRPD images with MLflow for experiment tracking and model versioning.
Machine Learning TensorFlow MLOps Azure ML
Satellite Payload and Communication Systems
SUPARCO, Pakistan (Oct 2014 - Apr 2019)
Designed satellite payloads and high-speed multi-layer PCBs, ensuring signal integrity, thermal management, and radiation tolerance for space-grade applications. Developed embedded systems with RTOS for satellite communication and implemented FPGA-based DSP/RF processing. Contributed to the successful launch of PakTes-1A satellite.
Satellite Systems FPGA PCB Design Embedded Systems
SoC/RTL Verification and Digital IC Design
NECOP, Pakistan (Apr 2019 - Sep 2022)
Led SoC/RTL verification with SystemVerilog and UVM, managed digital IC design flow (synthesis, DFT, STA, sign-off), and optimized designs for power, performance, and area (PPA). Implemented FPGA/SoC designs using Verilog and High-Level Synthesis approaches.
SoC Design RTL Verification SystemVerilog UVM